 省市场
省市场
 地方分中心
地方分中心 南京分中心
南京分中心
 淮安分中心
淮安分中心
 徐州分中心
徐州分中心
 南通分中心
南通分中心
 无锡分中心
无锡分中心
 苏州分中心
苏州分中心
 扬州分中心
扬州分中心
 镇江分中心
镇江分中心
 常州分中心
常州分中心
 连云港分中心
连云港分中心
 江阴分中心
江阴分中心
 盐城分中心
盐城分中心
 行业分中心
行业分中心 物联网分中心(无锡)
物联网分中心(无锡)
 矿山安全分中心(徐州)
矿山安全分中心(徐州)
 人工智能分中心(苏州)
人工智能分中心(苏州)
 节能环保分中心(宜兴)
节能环保分中心(宜兴)
 汽车及核心零部件分中心(常熟)
汽车及核心零部件分中心(常熟)
 机器人及精密装备制造分中心(昆山)
机器人及精密装备制造分中心(昆山)
 金属新材料分中心(张家港)
金属新材料分中心(张家港)
 高端能源装备分中心(常州)
高端能源装备分中心(常州)
 海洋可再生能源分中心(盐城)
海洋可再生能源分中心(盐城)
 高效节能分中心(镇江)
高效节能分中心(镇江)
 网络信息安全分中心(泰州)
网络信息安全分中心(泰州)
 先进复合材料分中心(宿迁)
先进复合材料分中心(宿迁)

店铺信息
 盐城工业职业技术学院
盐城工业职业技术学院 电话 138xxxx1437
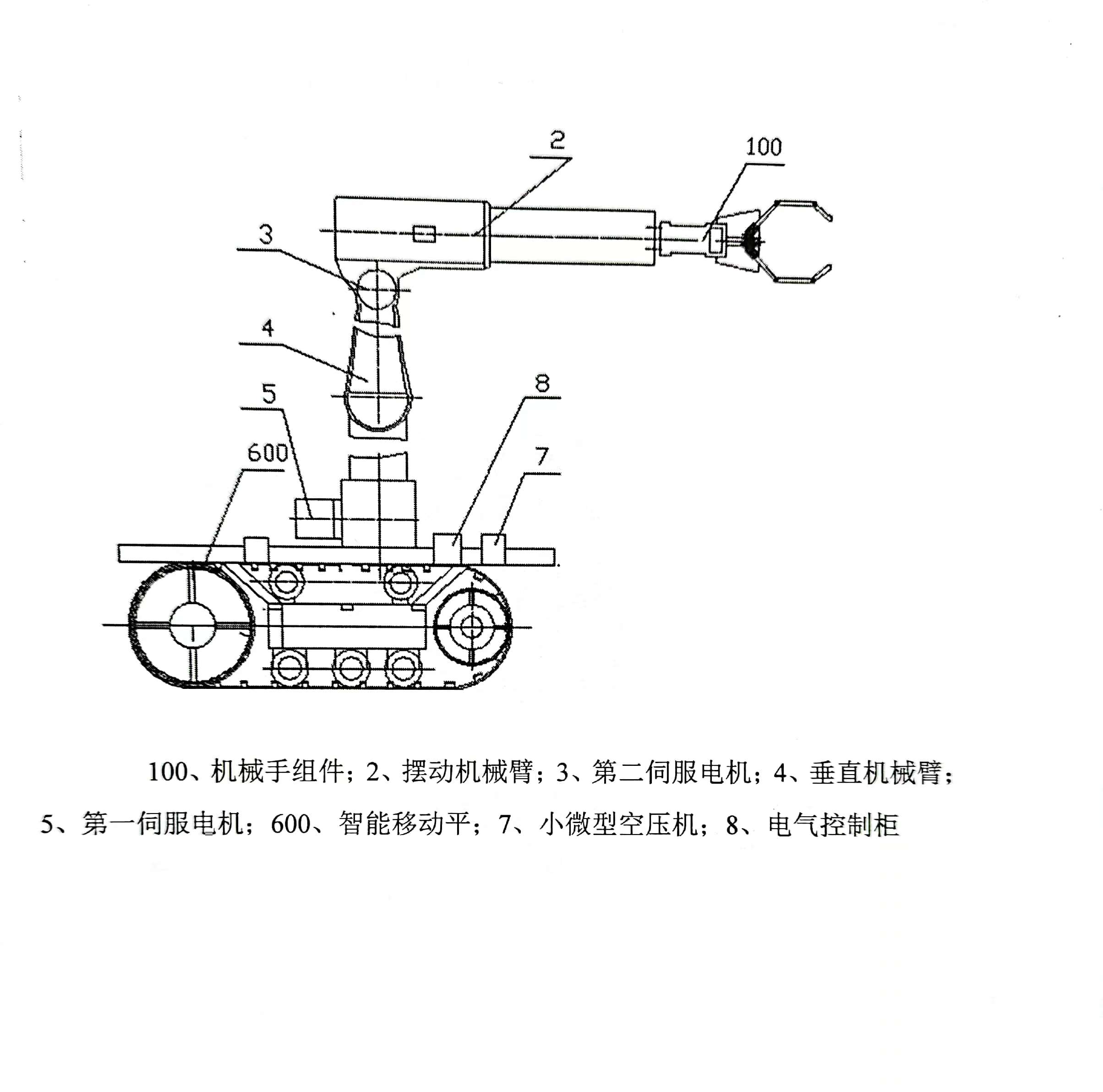
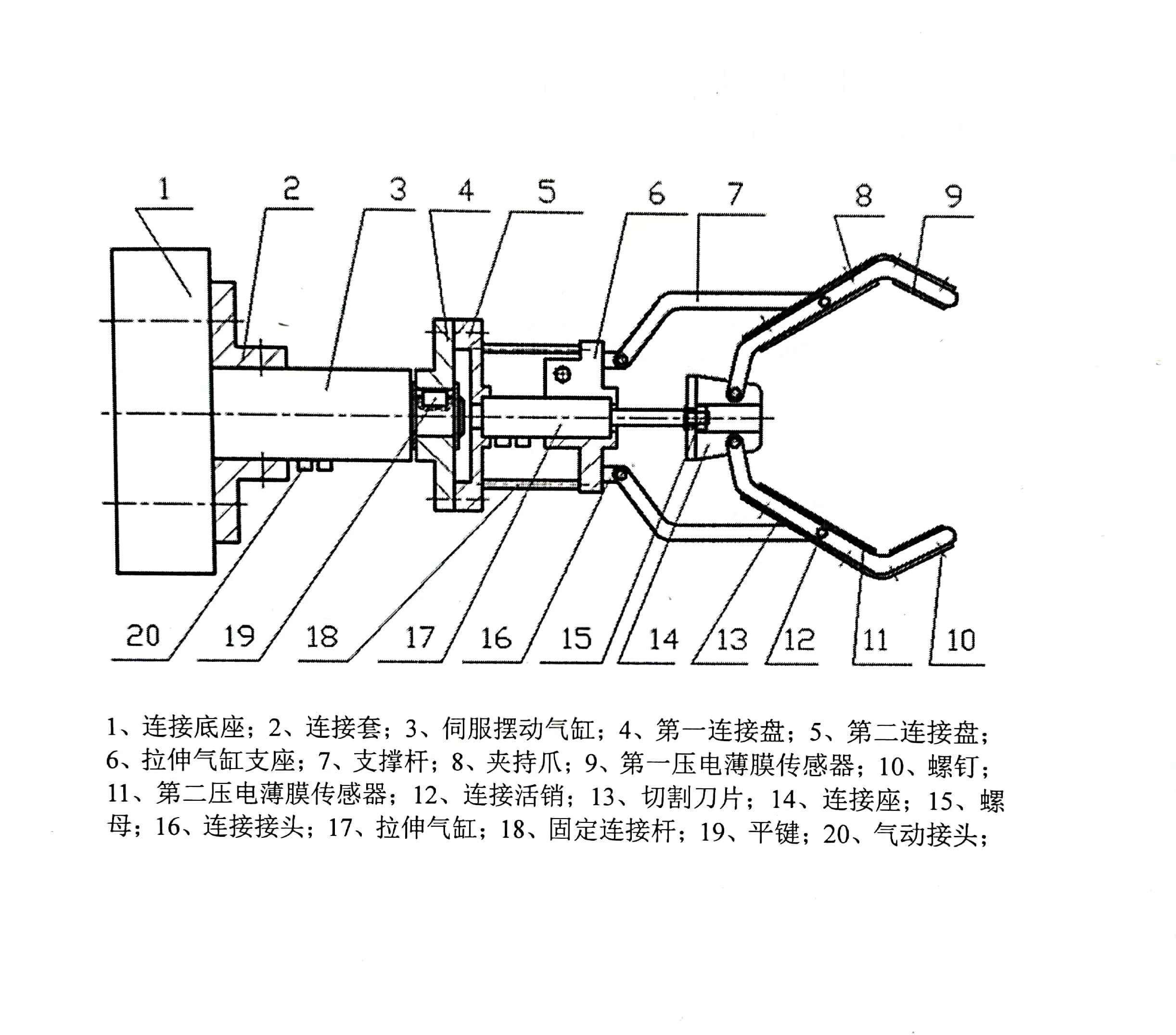
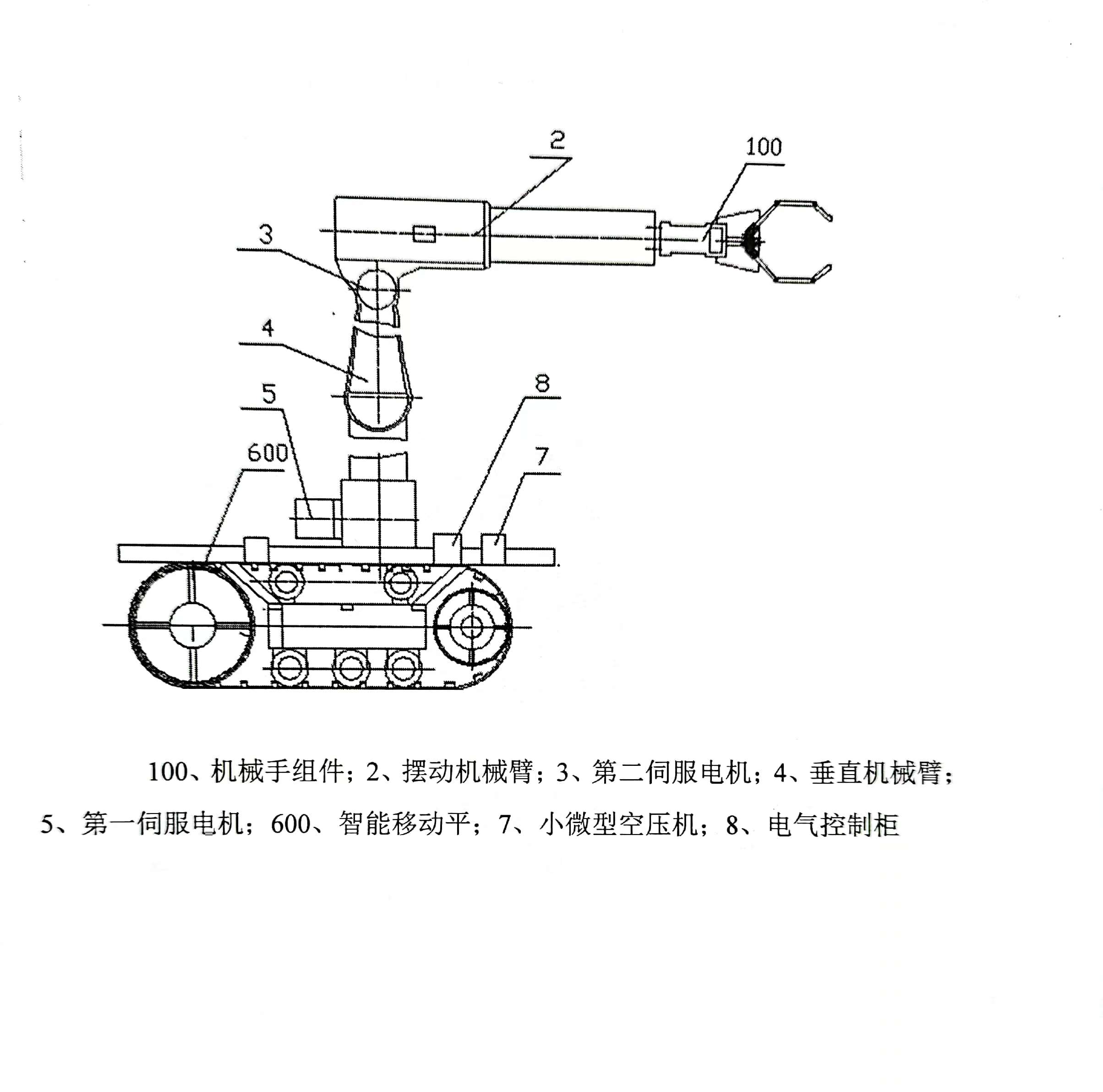
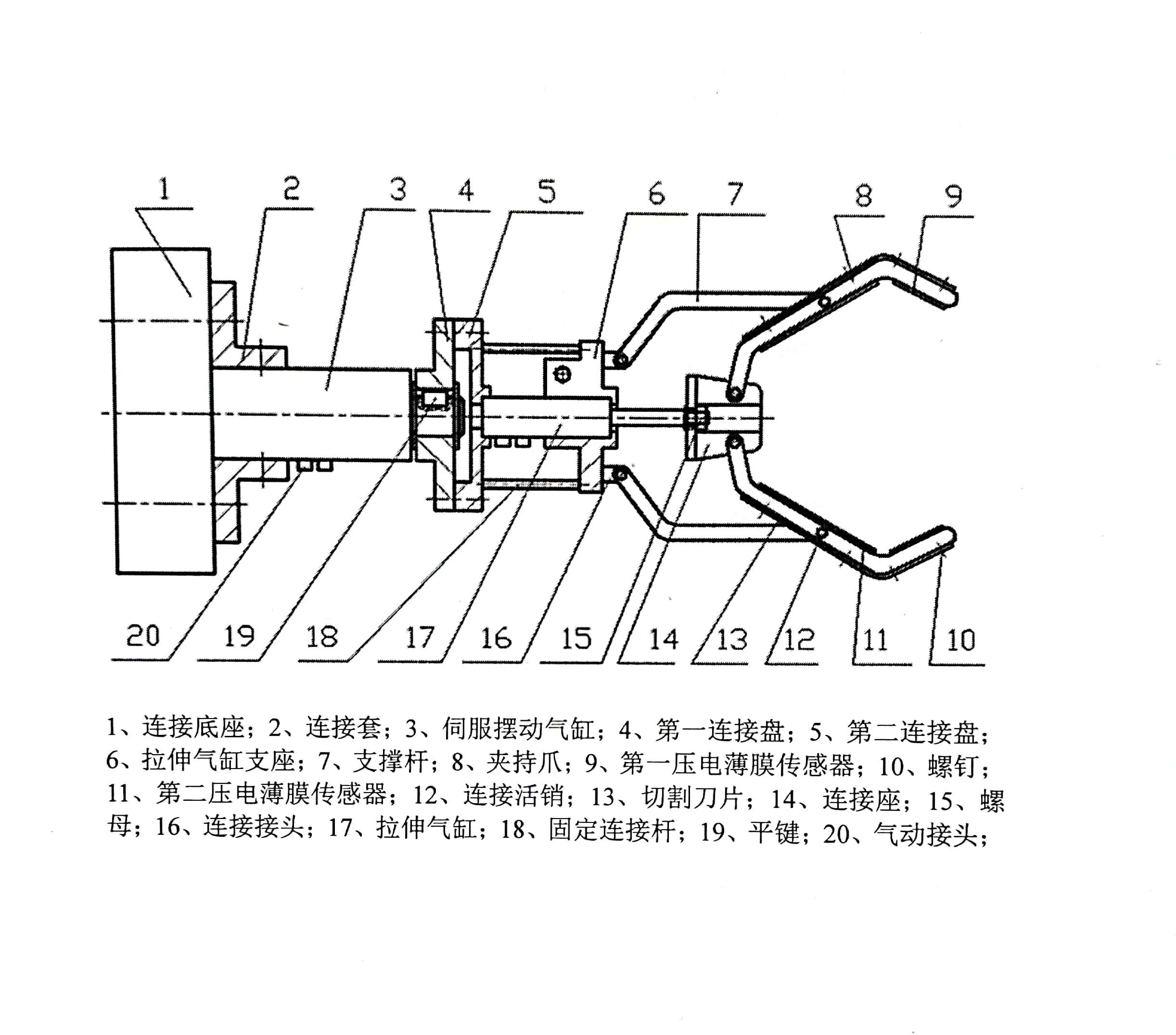
项目成果主要研发一种电动智能采摘平台装置,主要用于苹果等果实采摘。重点研究了以下内容:1、研发了电动智能采摘平台装置总体机械结构,包括机械臂、机械手结构、伺服电机、智能移动平台等部件。智能移动平台安装有直流小微型空压机,为采摘机械手提供高压气体,采摘机械手安装有OpenMV图像识别系统,可根据果实颜色进行目标识别。2、研发新型采摘机械手结构,提高采摘效率。果蔬采摘机械手机构包括夹持机构和旋转切割机构。夹持机构主要实现对圆形及椭圆形果实的夹持,旋转切割机构则是实现对果实的分离。采用拉伸气缸拉动三个采摘爪进行夹持,结构简便;在采摘爪上粘贴压电薄膜传感器,根据检测电压值大小来确定夹持力的数值,实时控制拉伸气缸运行,从而使三个采摘爪对果实的夹持,解决机械手夹持力不便控制的问题,减少了因机械手夹持力过大对果实的损坏。采用伺服摆动气缸旋转180度(角度可调)并运用割刀进行果实与果树分离,提高了采摘的效率。3、结合PLC和单片机进行联合控制,利用OpenMV图像识别系统,解决采摘过程中的目标识别及跟踪问题。利用OpenMV智能图像识别系统组件寻找目标,确定坐标,同时机械手张开 ,智能图像识别系统组件OpenMV中的STM32通过驱动控制多组伺服电机工作,机械手接近目标,通过PLC控制电磁阀使拉伸气缸缩回,带动机械手采摘爪夹持果实,根据压电薄膜传感器确定气缸缩回行程距离(确定夹持力大小),STM32给PLC发出指令,摆动气缸旋转180度,进行分离,完成采摘。运用电动智能采摘平台装置可有效降低劳动强度及人工成本。 项目主要完成指标:定位精度达到1mm,采摘果疏高度范围达到0-3m。
| 商品类型 | 技术成果 | 项目阶段 | 小批量生产 | 成果权属 | 独占 |
| 技术领域 | 交易方式 | 合作开发 | 权属人 |
暂无数据
猜你喜欢
换一批
 富硒酵母及其富硒食品饮料
富硒酵母及其富硒食品饮料 面议
 一种能够精准排出货币数量且具有防护功能的金融柜
一种能够精准排出货币数量且具有防护功能的金融柜 ¥ 30,000 元
- 一种金融办公用便于调节的多功能折叠存储一体式办公椅
¥ 30,000 元
- 基于磁性纳米药物的前列腺癌局部去势治疗技术
面议


{kind=link}
{kind=link}